
Պիեզոէլեկտրական երթևեկության սենսոր AVC-ի համար (ավտոմատ տրանսպորտային միջոցների դասակարգում)


Կարճ նկարագրություն.
CET8311 խելացի երթևեկության սենսորը նախատեսված է ճանապարհի վրա կամ ճանապարհի տակ մշտական կամ ժամանակավոր տեղադրման համար՝ երթևեկության տվյալները հավաքելու համար: Սենսորի եզակի կառուցվածքը թույլ է տալիս այն ամրացնել ուղիղ ճանապարհի տակ՝ ճկուն ձևով և այդպիսով համապատասխանել ճանապարհի ուրվագծին: Սենսորի հարթ կառուցվածքը դիմացկուն է ճանապարհի աղմուկին, որն առաջանում է ճանապարհի մակերեսի, հարակից գոտիների ճկման և մեքենային մոտեցող ճկվող ալիքների հետևանքով: Մայթի վրա փոքր կտրվածքը նվազեցնում է ճանապարհի մակերևույթին հասցված վնասը, մեծացնում է տեղադրման արագությունը և նվազեցնում տեղադրման համար պահանջվող քսուքը:
Ապրանքի մանրամասն
Ներածություն
CET8311 խելացի երթևեկության սենսորը նախատեսված է ճանապարհի վրա կամ ճանապարհի տակ մշտական կամ ժամանակավոր տեղադրման համար՝ երթևեկության տվյալները հավաքելու համար: Սենսորի եզակի կառուցվածքը թույլ է տալիս այն ամրացնել ուղիղ ճանապարհի տակ՝ ճկուն ձևով և այդպիսով համապատասխանել ճանապարհի ուրվագծին: Սենսորի հարթ կառուցվածքը դիմացկուն է ճանապարհի աղմուկին, որն առաջանում է ճանապարհի մակերեսի, հարակից գոտիների ճկման և մեքենային մոտեցող ճկվող ալիքների հետևանքով: Մայթի վրա փոքր կտրվածքը նվազեցնում է ճանապարհի մակերևույթին հասցված վնասը, մեծացնում է տեղադրման արագությունը և նվազեցնում տեղադրման համար պահանջվող քսուքը:
CET8311 խելացի երթևեկության սենսորի առավելությունն այն է, որ այն կարող է ստանալ ճշգրիտ և կոնկրետ տվյալներ, ինչպիսիք են ճշգրիտ արագության ազդանշանը, ձգանման ազդանշանը և դասակարգման տեղեկատվությունը: Այն կարող է երկար ժամանակ արձագանքել երթևեկության տեղեկատվության վիճակագրությանը, լավ կատարողականությամբ, բարձր հուսալիությամբ և հեշտ տեղադրմամբ: Բարձր գնով կատարողականություն, որը հիմնականում օգտագործվում է առանցքի համարի, անիվի բազայի, մեքենայի արագության մոնիտորինգի, տրանսպորտային միջոցների դասակարգման, դինամիկ կշռման և երթևեկության այլ տարածքների հայտնաբերման համար:
Ընդհանուր չափս

Օրինակ՝ L=1,78 մետր; Սենսորի երկարությունը 1,82 մետր է; Ընդհանուր երկարությունը 1,94 մետր է
| Սենսորի երկարությունը | Տեսանելի փողային երկարություն | Ընդհանուր երկարություն (ներառյալ ծայրերը) |
| 6' (1,82 մ) | 70'' (1,78 մ) | 76'' (1,93 մ) |
| 8' (2,42 մ) | 94'' (2,38 մ) | 100'' (2,54 մ) |
| 9' (2,73 մ) | 106'' (2,69 մ) | 112'' (2,85 մ) |
| 10' (3,03 մ) | 118'' (3.00 մ) | 124'' (3,15 մ) |
| 11' (3,33 մ) | 130'' (3,30մ) | 136'' (3,45 մ) |
Տեխնիկական պարամետրեր
| Մոդել No. | QSY8311 |
| Բաժնի չափը | ~3×7 մմ2 |
| Երկարություն | կարող է հարմարեցվել |
| Պիեզոէլեկտրական գործակից | ≥20pC/N Անվանական արժեքը |
| Մեկուսացման դիմադրություն | >500 MΩ |
| Համարժեք հզորություն | ~6,5 nF |
| Աշխատանքային ջերմաստիճան | -25℃~60℃ |
| Ինտերֆեյս | Q9 |
| Մոնտաժային բրա | Կցեք մոնտաժային բրա սենսորով (նեյլոնե նյութը չի վերամշակվում): 1 հատ բրա յուրաքանչյուր 15 սմ |
Տեղադրման նախապատրաստում
Ճանապարհի հատվածի ընտրություն.
ա) Կշռման սարքավորումների պահանջը. երկարաժամկետ կայունություն և հուսալիություն
բ) Ճանապարհի հատակի պահանջը. կոշտություն
Տեղադրման եղանակը
5.1 Կտրող բնիկ.
| Քայլեր | Նկար |
| 1) Շինարարության նախազգուշական նշանները պետք է տեղադրվեն շինհրապարակի դիմաց: 2)Գծեք գիծ. օգտագործեք ժապավեն, թերթաքար մատիտ և թանաքով շատրվան՝ գծելու և նշեք այն դիրքը, որտեղ տեղադրված է սենսորը, ինչպես նաև համոզվեք, որ մալուխները բավականաչափ երկար են՝ միանալու ճանապարհի կաբինետին:3) Կտրող բնիկ. գծանշման գծի երկայնքով ճանապարհի վրա քառակուսի ակոս բացելու համար օգտագործեք կտրիչ: Ակոսի խաչմերուկի չափը պետք է ճշգրիտ վերահսկվի նշված տիրույթում (տե՛ս գծապատկերը աջ կողմում): Ըստ սենսորի երկարության, խորացրեք ակոսի ծայրերի խորությունը մինչև 50 մմ (սենսորի ելքային գլխին և ծայրին հարմարվելու համար): 4) Ճանապարհի խախտում.uսեղմեք մուրճը ակոսելու համար և կտրեք ակոսի հատակը: Ակոսի հատակը պետք է հնարավորինս հարթ կտրված լինի: Ըստ գծագրի՝ ճիշտ նկարը և համապատասխան հիմնական շինարարական գծագրերը։ Հիմնական սարքավորումներ՝ մայթի կտրող մեքենա, հարվածային մուրճ, ցախ, փորվածք։ Նշում. Վերահսկեք մոնտաժային ակոսի ջախջախման խորությունը: Եթե այն չափազանց մակերեսային է, սենսորը և ամրակը չեն կարող տեղավորվել: Եթե դա շատ խորն է, ապա խառնաշփոթի քանակըմեծ կլինի: groutմեծ կլինի: | 1) Խաչաձեւ հատվածի չափը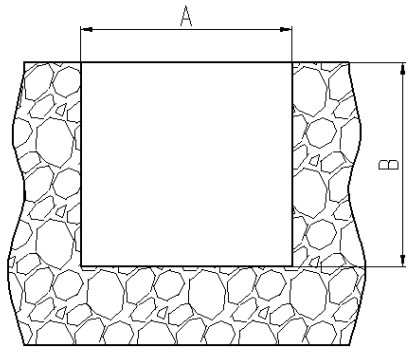 A=20մմ(±3մմ)մմ;B=30(±3մմ)մմ 2) ակոսի երկարությունը Անցքի երկարությունը պետք է լինի ավելի քան 100-ից 200 մմ սենսորի ընդհանուր երկարությունից: Սենսորի ընդհանուր երկարությունը. i=L+165 մմ, L-ը արույրի երկարության համար է (Տե՛ս պիտակը): |


5.2 Մաքուր և չոր քայլեր
1, Ապահովելու համար, որ կաթսա նյութը կարող է լավ համակցվել ճանապարհի մակերեսին լցնելուց հետո, տեղադրման անցքը պետք է լվացվի բարձր ճնշման մաքրիչով, իսկ ակոսի մակերեսը պետք է լվացվի պողպատե խոզանակով, իսկ օդային կոմպրեսորը/բարձր ճնշման օդային ատրճանակը կամ փչակը մաքրելուց հետո օգտագործվի ջուրը չորացնելու համար:
2, Աղբը մաքրելուց հետո շինարարական մակերեսի վրա լողացող մոխիրը նույնպես պետք է մաքրվի: Եթե կա կուտակված ջուր կամ ակնհայտ տեսանելի խոնավություն, այն չորացնելու համար օգտագործեք օդային կոմպրեսոր (բարձր ճնշման օդային ատրճանակ) կամ փչակ:
3, Մաքրման ավարտից հետո կիրառվում է կնքման ժապավեն (50 մմ-ից ավելի լայնություն)
դեպի ճանապարհի մակերեսը խազի շրջակայքում, որպեսզի կանխի աղտոտումը խարույկի վրա:


5.3 Նախնական տեղադրման փորձարկում
1, Փորձարկման հզորություն. Օգտագործեք թվային բազմաչափ՝ կցված մալուխով սենսորի ընդհանուր հզորությունը չափելու համար: Չափված արժեքը պետք է լինի համապատասխան երկարության սենսորի և մալուխի տվյալների թերթիկի կողմից սահմանված միջակայքում: Փորձարկողի միջակայքը սովորաբար սահմանվում է 20nF: Կարմիր զոնդը միացված է մալուխի միջուկին, իսկ սևը՝ արտաքին վահանին։ Նկատի ունեցեք, որ չպետք է միացման երկու ծայրերը միաժամանակ պահեք:
2, Փորձարկման դիմադրություն. Չափեք դիմադրությունը սենսորի երկու ծայրերում թվային բազմաչափով: Հաշվիչը պետք է սահմանվի 20MΩ: Այս պահին ժամացույցի ցուցմունքը պետք է գերազանցի 20MΩ-ը, որը սովորաբար նշվում է «1»-ով:
5.4 Ամրագրեք մոնտաժային բրա
| Քայլեր | Նկար |
| 1) Ապափաթեթից հանեք սենսորը և ստուգեք՝ արդյոք սենսորը անձեռնմխելի է: Ուղղեք սենսորը՝ սենսորն ուղիղ և հարթ պահելու համար: 2) Բացեք մոնտաժային ամրակը տուփի մեջ և տեղադրեք ամրակը սենսորի երկայնքով մոտ 15 սմ ընդմիջումներով: կտրող անցքի մեջ: Բոլոր փակագծերի վերին մակերեսը գտնվում է ճանապարհի մակերեսից մոտ 10 մմ հեռավորության վրա: 4)Սենսորի ծայրը թեքեք ներքև 40°, հանգույցը թեքեք ներքև 20°, ապա թեքեք այն 20° վերև մինչև մակարդակը: | 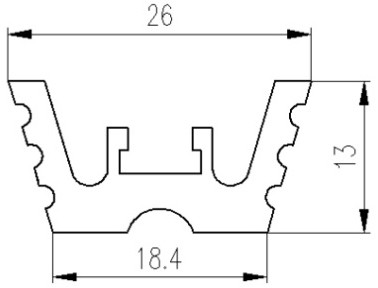 Չափս Չափս
|
5.5 Խառնել քսուքը
Ծանոթագրություն. Խառնելուց առաջ մանրակրկիտ կարդալու հրահանգները:
1)Բացեք կաթսայի խառնուրդը, ըստ լցման արագության և պահանջվող դեղաչափի, այն կարող է իրականացվել փոքր քանակությամբ, բայց մի քանի անգամ՝ թափոններից խուսափելու համար:
2)Պատրաստեք պատշաճ քանակությամբ խաշած կաղամբ՝ ըստ նշված հարաբերակցության և հավասարաչափ հարեք էլեկտրական մուրճով հարիչով (մոտ 2 րոպե):
3)Պատրաստվելուց հետո, խնդրում ենք օգտագործել 30 րոպեի ընթացքում՝ դույլի մեջ պնդացումից խուսափելու համար:
5.6 Հյուսվածքի լցման առաջին քայլերը
1) Հավասարաչափ լցնել ակոսը ակոսի երկարությամբ:
2)Լրացնելիս ջրահեռացման նավահանգիստը կարող է ձեռքով ձևավորվել՝ հեշտացնելու արագության և ուղղության վերահսկումը լցնելու ընթացքում: Ժամանակն ու ֆիզիկական ուժը խնայելու համար այն կարելի է լցնել ավելի փոքր տարողությամբ տարաներով, ինչը հարմար է մի քանի մարդկանց միաժամանակ աշխատելու համար։
3)Առաջին լցոնումը պետք է լինի լրիվ լցված անցքեր, և կեղևի մակերեսը մի փոքր ավելի բարձր լինի, քան մայթը:
4)Խնայեք ժամանակը որքան հնարավոր է, հակառակ դեպքում քսուքը կպնդանա (այս արտադրանքը նորմալ պնդացման ժամանակ ունի 1-ից 2 ժամ):
5.7 Խառնուրդի լցման երկրորդ քայլերը
Այն բանից հետո, երբ առաջին grouting-ը հիմնովին բուժվել է, դիտեք մանրաթելերի մակերեսը: Եթե մակերեսը ցածր է ճանապարհի մակերեսից կամ մակերեսը փորված է, ապա խառնեք քսուքը (տես քայլ 5.5) և կատարեք երկրորդ լցոնումը:
Երկրորդ լցոնումը պետք է ապահովի, որ թաղանթի մակերեսը մի փոքր բարձր լինի ճանապարհի մակերեսից:
5.8 Մակերեւութային մանրացում
Տեղադրվելուց հետո 5.7 քայլը ավարտվում է կես ժամով, և քսուքը սկսում է ամրանալ, պոկել ժապավենները անցքերի կողմերից:
Տեղադրումից հետո 5.7 քայլն ավարտվել է 1 ժամով, և մանրաձևն ամբողջությամբ ամրացվել է, մանրացնել
քսել անկյունային սրճաղացով, որպեսզի այն հարթվի ճանապարհի մակերեսին:
5.9 Տեղում մաքրում և տեղադրումից հետո փորձարկում
1) Մաքրել քսուքների մնացորդները և այլ բեկորներ:
2) Տեղադրումից հետո փորձարկում.
(1) Փորձարկման հզորություն. օգտագործեք թվային բազմաչափ ցուցիչի ընդհանուր հզորությունը միացված մալուխով չափելու համար: Չափված արժեքը պետք է լինի համապատասխան երկարության սենսորի և մալուխի տվյալների թերթիկի կողմից սահմանված միջակայքում: Փորձարկողի միջակայքը սովորաբար սահմանվում է 20nF: Կարմիր զոնդը միացված է մալուխի միջուկին, իսկ սևը՝ արտաքին վահանին։ Զգույշ եղեք, որ միացման երկու ծայրերը միաժամանակ չպահեք:
(2) Փորձարկման դիմադրություն. օգտագործեք թվային բազմաչափ ցուցիչի դիմադրությունը չափելու համար: Հաշվիչը պետք է սահմանվի 20MΩ: Այս պահին ժամացույցի ցուցմունքը պետք է գերազանցի 20MΩ-ը, որը սովորաբար նշվում է «1»-ով:
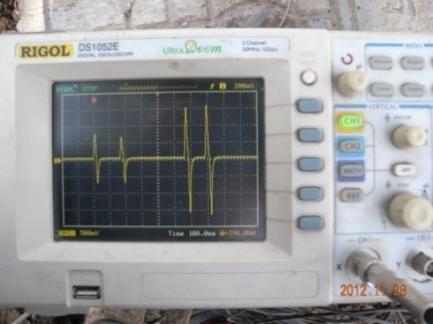
(3) Նախնական բեռնման փորձարկում. տեղադրման մակերեսը մաքրելուց հետո միացրեք սենսորային ելքը օքսիլոսկոպին: Օսցիլոսկոպի բնորոշ կարգավորումն է. Լարումը 200 մՎ/դիվ, Ժամանակը 50 մս/դիվ: Դրական ազդանշանի համար ձգանման լարումը սահմանվում է մոտ 50 մՎ: Բեռնատարի և մեքենայի տիպիկ ալիքի ձևը հավաքվում է որպես նախապես բեռնված փորձարկման ալիքի ձև, այնուհետև փորձնական ալիքի ձևը պահվում և պատճենվում է տպագրության համար և ընդմիշտ պահպանվում: Սենսորի ելքը կախված է մոնտաժման եղանակից, սենսորի երկարությունից, մալուխի երկարությունից և օգտագործվող կաթսայի նյութից: Եթե նախաբեռնման փորձարկումը նորմալ է, ապա տեղադրումն ավարտված է:
3) Երթևեկության բացթողում. դիտողություններ. Երթևեկությունը կարող է ազատվել միայն այն դեպքում, երբ կաթսայի նյութը լիովին բուժվել է (վերջին լցումից մոտ 2-3 ժամ հետո): Եթե երթևեկությունը բաց է թողնվում, երբ կաթսայի նյութը թերի է բուժվում, դա կվնասի տեղադրումը և կհանգեցնի սենսորի վաղաժամ ձախողմանը:
Նախաբեռնված փորձարկման ալիքի ձևը

2 առանցք

3 առանցք
4 առանցք

6 առանցք
Enviko-ն մասնագիտացած է Շարժման կշռման համակարգերում ավելի քան 10 տարի: Մեր WIM սենսորները և այլ արտադրանքները լայն ճանաչում ունեն ITS ոլորտում:




