
Նախ, համակարգի կազմը
1. Մայրուղու գերբեռնվածության անդադար հայտնաբերման համակարգը սովորաբար կազմված է առջևի բեռնատար մեքենաների ծանրաբեռնվածության տեղեկատվության հավաքագրման և դատաբժշկական համակարգից և հետևի բեռնատար մեքենաների գերբեռնվածության տեղեկատվության կառավարումից:
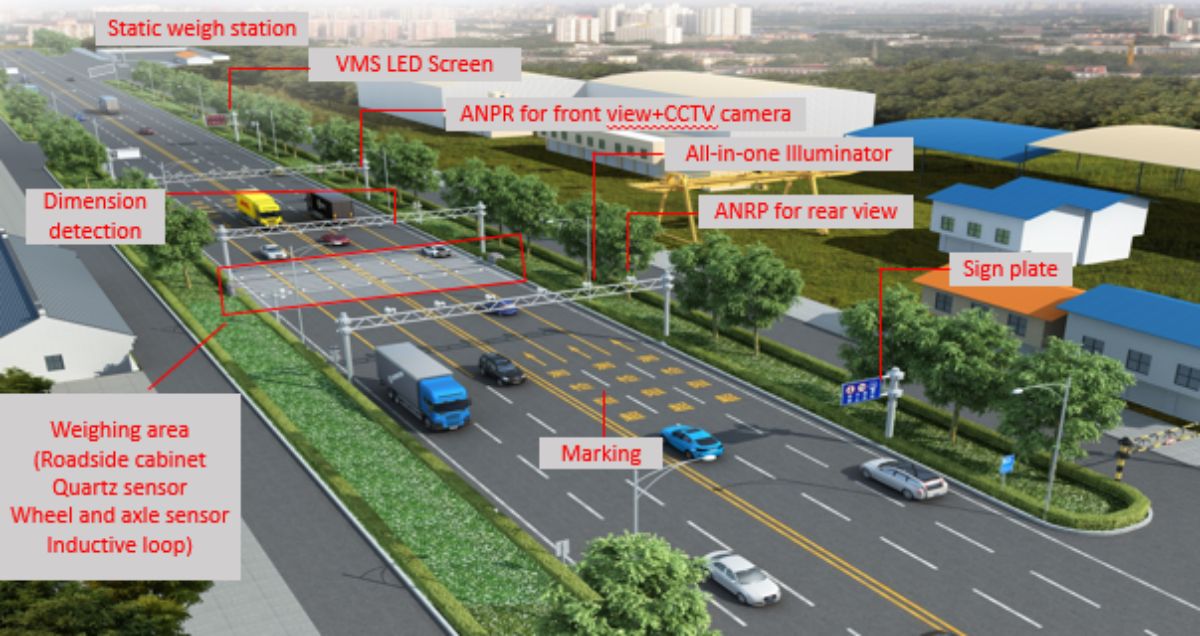
2. Առջևի բեռնատար մեքենաների ծանրաբեռնվածության տեղեկատվության հավաքագրման և դատաբժշկական համակարգը հիմնականում բաղկացած է առանց կանգառի կշռման սարքավորումներից, մեքենայի պրոֆիլի չափի հայտնաբերման սարքավորումներից, պետհամարանիշների ճանաչման և գրավման սարքավորումներից, մեքենայի դետեկտորից, տեսահսկման սարքավորումներից, տեղեկատվության հաղորդման սարքավորումներից, ճանապարհային նշաններից, էլեկտրամատակարարման և կայծակային պաշտպանության միջոցներից, տեղում հսկիչ պահարաններից, տեղեկատվության փոխանցման սարքավորումների հավաքագրման և մշակման սարքավորումներից, երթևեկության նշանների հայտնաբերման և մշակման սարքավորումներից և հարակից օժանդակ միջոցներ:
3. Հետևի բեռնատար մեքենաների գերբեռնվածության տեղեկատվության կառավարման (ներառյալ ուղղակի կիրարկումը) հարթակը սովորաբար կազմված է շրջանի (շրջանի), մունիցիպալ և մարզային գերբեռնվածության տեղեկատվության կառավարման (ներառյալ ուղղակի կիրարկման) հարթակներից:
2. Ֆունկցիոնալ պահանջներ
1. Անդադար կշռող սարքավորումների ֆունկցիոնալ պահանջներ
1.1 Գործառնական արագության միջակայք
Անդադար կշռող սարքավորման արագության միջակայքը (0,5-100) կմ/ժ է, որպեսզի բեռնատար մեքենաներն անցնեն անդադար հայտնաբերման տարածքով:
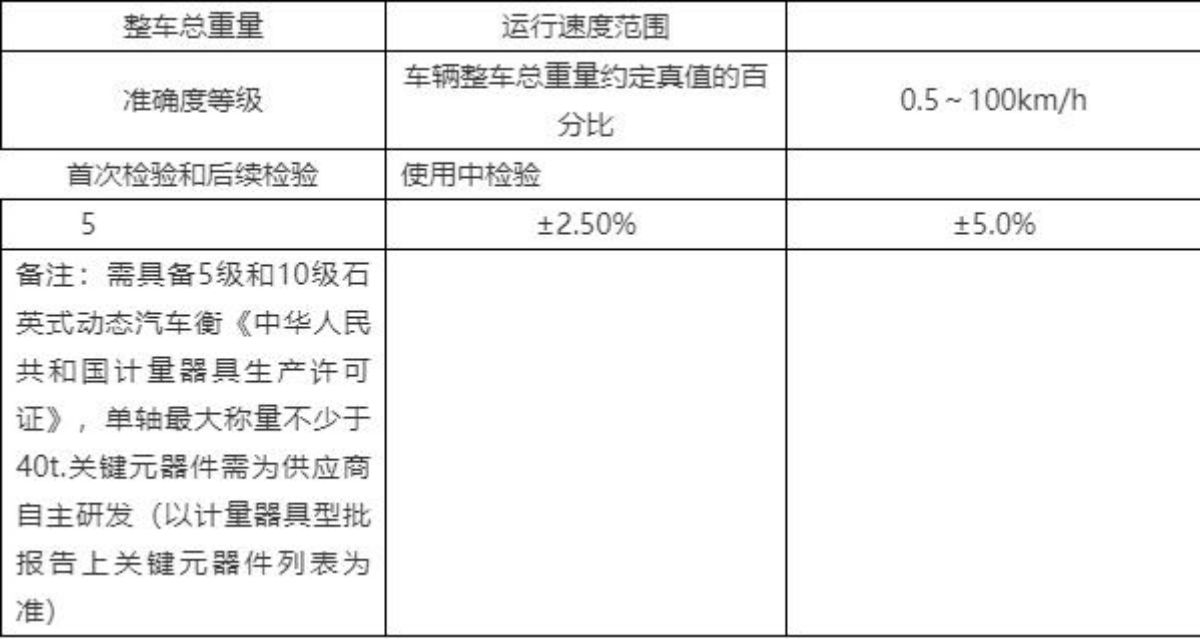
1.2 Մեքենայի ընդհանուր քաշի ճշգրտության մակարդակը
(1) Մեքենայի և բեռի ընդհանուր քաշի կշռման առավելագույն թույլատրելի սխալը անդադար կշռող սարքավորման թույլատրելի աշխատանքային արագության միջակայքում չպետք է ցածր լինի JJG 907 «Dynamic Highway Vehicle Automatic Weighting Apparatus Verification կանոնակարգեր-21» ճշտության մակարդակի 5-րդ և 10-ի դրույթներից և պահանջներից:
Աղյուսակ 2-1 Ավտոմեքենայի ընդհանուր քաշի դինամիկ կշռման առավելագույն թույլատրելի սխալը
(2) Երբ բեռնատար մեքենան կարճ ժամանակում անցնում է առանց կանգառի կշռման հայտնաբերման տարածքով` վարելու աննորմալ վարքագծով, ինչպիսիք են հաճախակի արագացումն ու դանդաղումը, ցատկման սանդղակը, կանգառը, S ոլորանը, հատումը, ճնշման գիծը, հետընթաց վարելը կամ կանգառ-գնալը, մեքենայի ընդհանուր քաշի ճշգրտության մակարդակը չպետք է լինի ավելի ցածր, քան T-ի համար նախատեսված սարքավորումների պահանջները: 2-1. (Գոտիները սեղմելը և հակառակ ուղղությամբ վարելը կարևոր են):
1.3 Անդադար կշռման սարքավորման մեջ օգտագործվող բեռնախցիկը պետք է համապատասխանի GB/T7551 «Բեռնախցիկի» դրույթներին և պահանջներին, ծառայության ժամկետը պետք է լինի ≥ 50 միլիոն առանցք, իսկ անդադար կշռման ժամանակ օգտագործվող բեռնախցիկի պաշտպանության մակարդակը չպետք է պակաս լինի IP68-ից: .
1.4 Անդադար կշռող սարքավորումների միջին անխափան աշխատանքային ժամանակը չպետք է լինի 4000 ժ-ից պակաս, իսկ հիմնական բաղադրիչների երաշխիքային ժամկետը` 2 տարուց պակաս, իսկ ծառայության ժամկետը` 5 տարուց պակաս:
1.5 Անջատման պաշտպանության պահանջներ
(1) Երբ հոսանքն անջատված է, անդադար կշռող սարքավորումը պետք է կարողանա ավտոմատ կերպով պահել ներկայումս սահմանված պարամետրերը և կշռման տեղեկատվությունը, և պահպանման ժամանակը չպետք է լինի 72 ժամից պակաս:
2) Էլեկտրաէներգիայի անջատման դեպքում անդադար կշռող սարքավորման ներքին ժամացույցի աշխատաժամանակը չպետք է լինի 72 դ-ից պակաս:
1.6 Հակակոռոզիոն բուժման պահանջներ
Անդադար կշռող սարքավորումների մերկացած մետաղական մասերը պետք է մշակվեն հակակոռոզիոն մշակմամբ՝ համաձայն GB/T18226 «Մայրուղիների երթևեկության ճարտարագիտության մեջ պողպատե բաղադրիչների հակակոռոզիայի տեխնիկական պայմանների» համապատասխան դրույթների։
1.7 Անդադար կշռող սարքավորման մեքենայի դետեկտորի արագության չափման սխալը պետք է լինի ≤± 1կմ/ժ, իսկ երթևեկության հոսքի հայտնաբերման ճշգրտությունը՝ ≥99%:
1.8 Անդադար կշռող սարքավորումների տրանսպորտային միջոցների բաժանարարների տեխնիկական պահանջները հետևյալն են.
(1) առանցքների թվի հայտնաբերման ճշգրտությունը պետք է լինի ≥98%:
(2) Լիսեռների տարածության հայտնաբերման սխալը պետք է լինի ≤± 10 սմ:
(3) Տրանսպորտային միջոցների դասակարգման ճշգրտությունը պետք է լինի ≥ 95%:
(4) Միջալիքային ճանաչման մակարդակը պետք է լինի ≥98%:
1.9 Աշխատանքային միջավայրի ջերմաստիճանի կիրառելի միջակայքը պետք է համապատասխանի -20°C~+80°C, իսկ շրջակա միջավայրի խոնավության դիմադրության տեխնիկական ցուցիչները պետք է համապատասխանեն JT/T817 «General Technical Requirements and Testing Methods for Highway Electromechanical System»–ի արտաքին մեխանիկական և էլեկտրական սարքավորումների համապատասխան կանոնակարգերին և պահանջներին։
1.10 Պետք է ձեռնարկվեն անձրևակայուն և փոշամեկուսիչ միջոցներ, իսկ պաշտպանության մակարդակը պետք է համապատասխանի JT/T817-ի դրույթներին և պահանջներին:

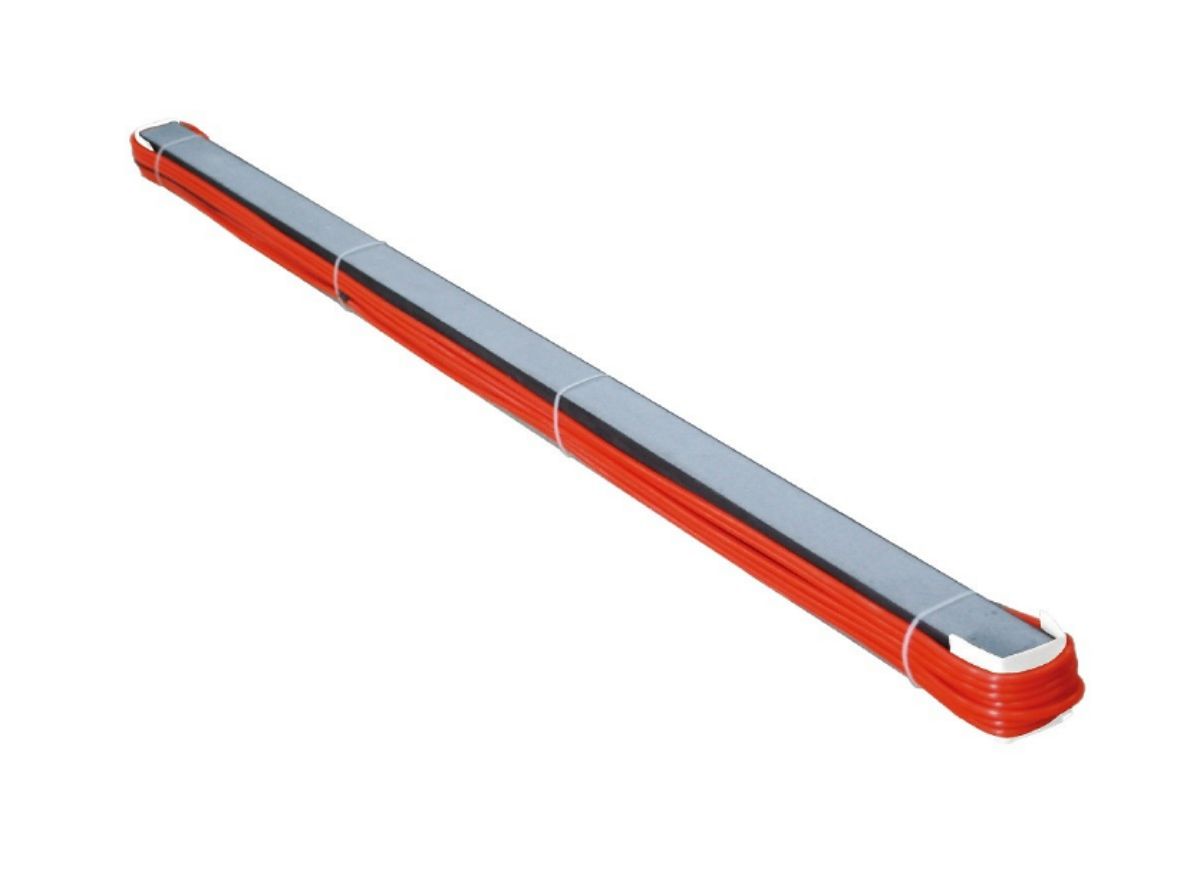
2. Տրանսպորտային միջոցների պրոֆիլի չափսերի փորձարկման սարքավորումների ֆունկցիոնալ պահանջներ
2.1 Երբ բեռնատար մեքենան անցնում է առանց կանգառի կշռման հայտնաբերման տարածքով (0,5-100) կմ/ժ արագությամբ, այն պետք է ավտոմատ կերպով ավարտի իրական ժամանակում արագ հայտնաբերումը բեռնատար մեքենայի երկարության, լայնության և բարձրության 3D մոդելի և թողարկի ճիշտ նույնականացման արդյունքները: Արձագանքման ժամանակը չպետք է լինի 30 մվ-ից պակաս, իսկ մեկ հայտնաբերման և ելքի արդյունքը ավարտելու ժամանակը չպետք է լինի 5 վրկ-ից ավելի:
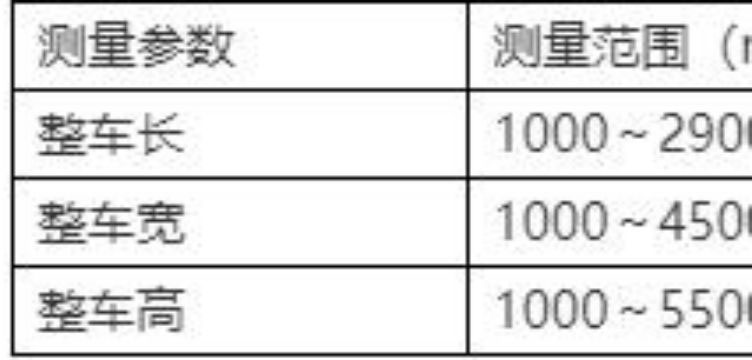
2.2 Բեռնատար մեքենայի երկարության, լայնության և բարձրության երկրաչափական չափումների միջակայքը պետք է համապատասխանի 2-2 աղյուսակի պահանջներին:
Աղյուսակ 2-2 Տրանսպորտային միջոցների պրոֆիլի չափսերի փորձարկման սարքավորումների չափման տիրույթ
2.3 Բեռնատար մեքենայի երկարության, լայնության և բարձրության երկրաչափական չափման լուծաչափը 1 մմ-ից ոչ ավելի է, իսկ մեքենայի ուրվագծային չափսերի հայտնաբերման սարքավորման չափման սխալը պետք է համապատասխանի հետևյալ պահանջներին 1-100 կմ/նորմալ աշխատանքային արագության սահմաններում.
(1) Երկարության սխալ≤±500 մմ;
(2) Լայնության սխալ≤±100 մմ;
(3) Բարձրության սխալը ≤± 50 մմ:
2.4 Մեքենայի պրոֆիլի չափսերի փորձարկման սարքավորումների լազերային կետի հայտնաբերման հաճախականությունը պետք է լինի ≥1կՀց, և այն պետք է ունենա 9 տեսակի տրանսպորտային միջոցների մոդելներ և տրանսպորտային միջոցների արագության հայտնաբերման գործառույթներ, որոնք նշված են GB1589 «Ավտոմեքենաների, կցորդների և ավտոմոբիլային գնացքների ուրվագծային չափը, առանցքի բեռը և որակի սահմանները»:
2.5 Այն պետք է ունենա զուգահեռ բեռնատար մեքենաների գործառույթներ, S- թեքում վարելու վիճակի դատողություն, սև նյութի պաշտպանություն և բարձր արտացոլող նյութի բեռնատար մեքենայի պրոֆիլի երկրաչափական չափի հայտնաբերում:
2.6-ը պետք է ունենա բեռնատար ավտոմեքենաների մոդելների դասակարգում, երթևեկության ծավալ, տեղակայման արագություն, առջևի ժամանակային հեռավորություն, հետևելով մեքենայի տոկոսին, առջևի տարածությանը, ժամանակի զբաղվածության հայտնաբերման գործառույթներին: Իսկ բեռնատար ավտոմեքենաների մոդելների դասակարգման ճշգրտությունը պետք է լինի ≥ 95%:
2.7 Աշխատանքային միջավայրի ջերմաստիճանի կիրառելի միջակայքը պետք է համապատասխանի -20 °C ~ +55 °C, իսկ շրջակա միջավայրի խոնավության դիմադրության տեխնիկական ցուցանիշները պետք է համապատասխանեն JT/T817 «General Technical Requirements and Testing Methods for Highway Electromechanical System»-ի արտաքին մեխանիկական և էլեկտրական սարքավորումների համապատասխան կանոնակարգերին և պահանջներին:
2.8 Լազերային տրանսպորտային միջոցի պրոֆիլի չափսերի փորձարկման սարքավորումները պետք է տեղադրվեն սպասարկման ալիքով պորտալով
2.9 Մեքենայի պրոֆիլի չափսերի փորձարկման սարքավորումների պաշտպանության մակարդակը չպետք է պակաս լինի IP67-ից:
3. Համարանիշների ճանաչման և որսալու սարքավորումների ֆունկցիոնալ պահանջներ
3.1 Համարանիշների ճանաչման և որսալու սարքավորումների գործառնական պահանջները պետք է համապատասխանեն GB/T 28649 «Ավտոմատ նույնականացման համակարգ ավտոմոբիլային տրանսպորտային միջոցների համարանիշերի» համապատասխան դրույթներին և պահանջներին:
3.2 Համարանիշի ճանաչման և որսալու սարքավորումը պետք է հագեցված լինի լցման լույսով կամ թարթող լույսով, որը ցանկացած եղանակային պայմաններում պետք է կարողանա հստակ պատկերել տրանսպորտային միջոցի համարը, որն անցնում է առանց կանգառի կշռման հայտնաբերման տարածքով ցանկացած եղանակային պայմաններում, և արձակի ճիշտ նույնականացման արդյունքը:
3.3 Համարանիշի ճանաչման և գրավման սարքավորումը պետք է գերազանցի ցերեկային համարանիշի ճանաչման ճշտության ≥ 99%-ը, իսկ գիշերը պետհամարանիշի ճանաչման ≥95%-ի ճշգրտությունը, իսկ ճանաչման ժամանակը չպետք է լինի ավելի քան 300 մվ:
3.4 Հավաքված բեռնատար մեքենայի համարանիշի պատկերը պետք է հստակ ելքագրվի ամբողջ լայնությամբ JPG ձևաչափով, իսկ ճանաչման արդյունքը պետք է ներառի ճանաչման ժամանակը, պետհամարանիշի գույնը և այլն:
3.5 պետհամարանիշի ճանաչման պատկերի պիքսելները չպետք է լինեն 5 միլիոնից պակաս, այլ ֆիքսված պատկերի պիքսելները չպետք է լինեն 3 միլիոնից պակաս, բեռնատար մեքենաները առանց կանգառի կշռման հայտնաբերման տարածքով պետք է գրավեն մեքենայի առջևը, մեքենայի երկու կողմերը և մեքենայի հետևի մասը՝ ընդհանուր առմամբ ոչ պակաս, քան 4 բարձր հստակությամբ պատկեր:
3.6 Համաձայն առջևի բարձր հստակ պատկերի տեղեկատվության՝ բեռնատար մեքենայի համարանիշի տարածքը, առջևի և խցիկի բնութագրերը, առջևի գույնը և այլն, պետք է կարողանան հստակ տարբերակել առանցքների քանակը, թափքի գույնը և փոխադրվող ապրանքների հիմնական իրավիճակը՝ ըստ մեքենայի կողմի բարձր հստակ պատկերի տեղեկատվության. Ըստ մեքենայի հետևի բարձր հստակ պատկերի տվյալների՝ կարելի է տարբերակել պոչի պետհամարանիշը, թափքի գույնը և այլ տեղեկություններ։
3.7 Յուրաքանչյուր պատկերի վրա պետք է տեղադրվեն այնպիսի տեղեկություններ, ինչպիսիք են հայտնաբերման ամսաթիվը, փորձարկման ժամանակը, փորձարկման վայրը, մեքենայի և բեռի ընդհանուր քաշը, մեքենայի չափսերը, պատկերի դատաբժշկական սարքավորումների համարը, հակակեղծման և այլ տեղեկություններ:
3.8 Նկարված պատկերի տեղեկատվության փոխանցման ալիքի թողունակությունը չպետք է պակաս լինի 10 Մբիթ/վրկ-ից:
3.9 Այն պետք է ունենա անսարքությունների ինքնաստուգման գործառույթներ, ինչպիսիք են աննորմալ հաղորդակցությունը և հոսանքի խափանումը:
3.10 Աշխատանքային միջավայրի ջերմաստիճանի կիրառելի միջակայքը պետք է համապատասխանի -20 °C ~ +55 °C, իսկ շրջակա միջավայրի խոնավության դիմադրության տեխնիկական ցուցանիշները պետք է համապատասխանեն JT/T817 «General Technical Requirements and Testing Methods for Highway Electromechanical System» մեխանիկական և էլեկտրական սարքավորումների համապատասխան կանոնակարգերին և պահանջներին:
3.11 Համարանիշների ճանաչման և որսալու սարքավորումների պաշտպանության մակարդակը չպետք է պակաս լինի IP67-ից:
4 Տեսահսկման սարքավորումների ֆունկցիոնալ պահանջներ
4.1 տեսահսկման տեսախցիկը պետք է ունենա ինֆրակարմիր ցերեկային և գիշերային տեսախցիկի ֆունկցիա և պետք է կարողանա անդադար կշռել տեսախցիկի գործառույթի հայտնաբերման տարածքը և պահպանել ոչ պակաս, քան 10 վրկ ապօրինի բեռնատար ավտոմեքենայի գերբեռնվածության ապացույցների հավաքագրման տեսագրման տվյալներ:
4.2 Այն պետք է ունենա ինքնաախտորոշման, տեսադաշտի չափորոշման և ավտոմատ փոխհատուցման գործառույթներ։
4.3 Դատաբժշկական վիդեո պատկերները պետք է լինեն ոչ պակաս, քան 3 միլիոն պիքսել և պետք է լինեն հստակ և կայուն:
4.4 Այն պետք է ունենա պտտման և խոշորացման գործառույթ, իսկ հորիզոնական և ուղղահայաց պտույտը և ոսպնյակի խոշորացումը կարող են իրականացվել կառավարման հրամանի համաձայն:
4.5 Այն պետք է ունենա անձրևի և ցրտահարության մառախուղի լամպերը մաքրելու և հեռացնելու գործառույթ, և պետք է կարողանա ժամանակին մաքրել, տաքացնել և հալեցնել պաշտպանիչ ծածկը:
4.6 Դատաբժշկական վիդեո պատկերները պետք է իրական ժամանակում փոխանցվեն վարչաշրջանի (քաղաքի) մակարդակի գերծանրաբեռնված տեղեկատվության կառավարման և կատարման ուղղակի հարթակին:
4.7 Տեսահսկման սարքավորումները և դրա պարագաների այլ տեխնիկական ցուցիչները պետք է համապատասխանեն GA/T995-ի համապատասխան դրույթներին և պահանջներին:
4.8 Աշխատանքային միջավայրի ջերմաստիճանի կիրառելի միջակայքը պետք է համապատասխանի -20°C~+55°C, իսկ շրջակա միջավայրի խոնավության դիմադրության տեխնիկական ցուցիչները պետք է համապատասխանեն JT/T817 «General Technical Requirements and Testing Methods for Highway Electromechanical System»–ի արտաքին մեխանիկական և էլեկտրական սարքավորումների համապատասխան կանոնակարգերին և պահանջներին։
5 Տեղեկատվության հրապարակման սարքավորումների ֆունկցիոնալ պահանջներ
5.1 Այն պետք է կարողանա իրական ժամանակում տեղեկատվություն տրամադրել տրանսպորտային միջոցի գերբեռնվածության մասին ապօրինի տրանսպորտային միջոցի վարորդին:
5.2 Այն պետք է կարողանա հրապարակել և ցուցադրել այնպիսի տեղեկություններ, ինչպիսիք են տեքստի փոփոխումը և ոլորումը:
5.3 Մայրուղու լուսադիոդային փոփոխական տեղեկատվական նշանների հիմնական գործառական ցուցիչները և տեխնիկական ցուցիչները պետք է համապատասխանեն GB/T23828 «Մայրուղու լուսադիոդային փոփոխական տեղեկատվական նշանների» համապատասխան դրույթներին և պահանջներին:
5.4 Երկսյունակ անդրանիկ տիպի մայրուղու LED փոփոխական տեղեկատվական նշանների ցուցադրման էկրանը, որը սովորաբար օգտագործվում է պիքսելների տարածությունը կարող է ընտրվել՝ 10 մմ, 16 մմ և 25 մմ: Չորս և վեց գոտիների ցուցադրման տարածքի չափը կարող է լինել համապատասխանաբար 10 քառակուսի մետր և 14 քառակուսի մետր: Ցուցադրման բովանդակության ձևաչափը կարող է լինել 1 տող և 14 սյունակ:
5.5 Մայրուղու մեկ սյունակ LED փոփոխական տեղեկատվական նշանների ցուցադրման պիքսելային հեռավորությունը կարող է ընտրվել՝ 10 մմ, 16 մմ և 25 մմ: Ցուցադրվող էկրանի չափերը կարելի է ընտրել 6 քառակուսի մետրից և 11 քմ-ից: Ցուցադրման բովանդակության ձևաչափը կարող է լինել 4 տող և 9 սյունակ:
5.6 Մայրուղու լուսադիոդային փոփոխական տեղեկատվական նշանների նախագծումը և տեղադրումը և տեսողական ճանաչման հեռավորությունը պետք է ամբողջությամբ հաշվի առնեն ճանապարհի հատվածում բեռնատար մեքենաների իրական արագությունը և տեսողական ճանաչման կարիքները և համապատասխանեն GB/T23828 «Մայրուղու LED փոփոխական տեղեկատվական նշանների» համապատասխան դրույթներին և պահանջներին:
6 Ճանապարհային նշանների սահմանման պահանջներ
6.1 Տեղադրել ճանապարհային նշան «անդադար կշռման և հայտնաբերման տարածք» մուտք գործելու համար 200 մետրից ոչ պակաս հեռավորության վրա՝ առանց կանգառի կշռման հայտնաբերման տարածքի դիմաց:
6.2 Անդադար կշռման հայտնաբերման վայրի դիմաց 150 մետրից ոչ պակաս ճանապարհային նշան տեղադրել «Գոտի փոփոխության արգելված է»:
6.3 Անդադար կշռման հայտնաբերման տարածքի ետևում 200 մետրից ոչ պակաս հեռավորության վրա տեղադրել «Վերացնել գոտի փոխելու արգելքը» ճանապարհային նշան:
6.4 Ճանապարհային նշանների տեղադրումը անդադար կշռման հայտնաբերման տարածքում պետք է համապատասխանի GB5768 «Ճանապարհային երթևեկության նշաններ և գծանշումներ» նախագծային և պահանջներին:
7. Էներգամատակարարման սարքավորումների և կայծակային պաշտպանության հիմնավորման պահանջներ
7.1 Ծանրաբեռնված տեղեկատվության հավաքագրման և դատաբժշկական համակարգը պետք է հագեցած լինի կայուն և հուսալի էլեկտրամատակարարման գծերով, որոնք պետք է կարողանան բավարարել 24-ժամյա անխափան էլեկտրամատակարարման պահանջները:
7.2 Կայծակից և գերլարման պաշտպանության անհրաժեշտ միջոցները պետք է ձեռնարկվեն գերբեռնվածության տեղեկատվության հավաքագրման և դատաբժշկական համակարգի և հարակից բաղադրիչների էլեկտրամատակարարման միջերեսի և կառավարման միջերեսի համար, իսկ պաշտպանական միջոցները պետք է համապատասխանեն JT/T817 «General Technical Requirements and Testing Methods for Highway Electromechanical System Equipment»-ի համապատասխան դրույթներին և պահանջներին:
7.3 Ծանրաբեռնված տեղեկատվության հավաքագրման և դատաբժշկական համակարգը պետք է ընդունի մեկ կետով մոտակա հիմնավորման մեթոդ, իսկ DC զուգահեռ հիմնավորման մեթոդը պետք է ընդունվի:
7.4 Ծանրաբեռնված տեղեկատվության հավաքագրման և դատաբժշկական սարքավորումների կայծակային պաշտպանությունը և էլեկտրական դիմադրությունը պետք է լինի ≤ 10 Ω, իսկ հողակցման պաշտպանիչ դիմադրությունը՝ ≤ 4 Ω:
8 Դաշտային կառավարման կաբինետի ֆունկցիոնալ պահանջներ

8.1 Տեղում կառավարվող կաբինետը, որը կազմաձևված է գերծանրաբեռնված տեղեկատվության հավաքագրման և դատաբժշկական համակարգով, պետք է կարողանա պահել տվյալների հավաքագրման պրոցեսորներ, տրանսպորտային միջոցների դետեկտորներ, ցանցային անջատիչներ և այլ սարքավորումներ: Այն պետք է կարողանա վերբեռնել բեռնատարի գերբեռնվածության մասին տեղեկատվությունը Մարզային տրանսպորտի տեղեկատվական կենտրոնի երթևեկության համապարփակ վարչական ուղղակի կիրարկման հարթակ և կարողանա իրական ժամանակում փոխանցել բեռնատարի ծանրաբեռնվածության մասին տեղեկատվությունը մայրուղու լուսադիոդային փոփոխական տեղեկատվության նշանին՝ թողարկման և ցուցադրման համար:
8.2 Կառավարման կաբինետը պետք է նախագծված լինի երկշերտ շասսի կնիքով, որը կարող է արդյունավետորեն կանխել փոշին և անձրևը և ունի ջերմաստիճանի վերահսկման անկախ համակարգ:
8.3 Կառավարման կաբինետը պետք է նախագծված լինի անցքերով, որպեսզի հեշտացնեն գործառույթի ընդլայնումը:
8.4 Վերահսկիչ կաբինետը պետք է հագեցած լինի տվյալների անվտանգության պաշտպանության սարքավորումներով, որպեսզի խուսափեն չափից ավելի հայտնաբերման տվյալների արտահոսքից:
9. Մայրուղու գերծանրաբեռնվածության համար անդադար կշռող տարածքների տեղադրման պահանջներ
9.1 Չդադարող կշռման հայտնաբերման տարածքը կազմված է առանց կանգառի կշռման սարքավորումների կրիչից (քվարց բյուրեղյա սենսոր) և դրա ուղեկցող հատվածներից առջևի և հետևի ծայրերում (ըստ կոշտացած ճանապարհի մակերեսի 30 մետր առջևից և 15 մետր հետևից) (Նկար 2-1):

Նկար 2-1 Անդադար կշռման տարածքի սխեմատիկ դիագրամ
9.2 Անդադար կշռման և փորձարկման տարածքի գտնվելու վայրը չպետք է հարթ լինի, երկայնական կորի շառավիղը փոքր է, տեսողության հեռավորությունը վատ է, իսկ ներքևի և այլ ճանապարհների երկար հատվածները, իսկ գծային ցուցիչները պետք է համապատասխանեն ASTM E1318 «Ստանդարտ Specification for Highway Weigh-In-In-Motion Systems-ի համար» Մեթոդներ, հատուկ պահանջները հետևյալն են.
(1) 60 մ ուղղորդող հատվածի և հետևի 30 մ ուղեցույցի ճանապարհի շրջադարձի շառավիղը առանց կանգառի կշռման հայտնաբերման տարածքում պետք է լինի ≥ 1,7 կմ:
(2) Ճանապարհի մակերեսի երկայնական թեքությունը առջևի 60 մ ուղեցույցի և հետևի 30 մ ուղեցույցի ճանապարհի հատվածում առանց կանգառի կշռման հայտնաբերման տարածքում պետք է լինի ≤2%:
(3) Առջևի 60 մ ուղեցույց ճանապարհի և հետևի 30 մ ուղեցույցի ճանապարհի անդադար կշռման հայտնաբերման տարածքի մայթին լայնակի թեքության արժեքը պետք է համապատասխանի 1% ≤ i ≤2%:
(4) 150 մ ուղեցույց ճանապարհի հատվածում վարորդի տեսադաշտը փակող ոչ մի խոչընդոտ չպետք է լինի՝ մինչև անդադար կշռման հայտնաբերման տարածքը:
5) Անդադար կշռման և հայտնաբերման տարածքի և մայրուղու թունելի մուտքի և ելքի միջև հեռավորությունը նույն ճանապարհահատվածում չպետք է լինի 2 կմ-ից և ոչ պակաս, քան 1 կմ-ից:
(6) Սենսորի և ճանապարհի մակերեսի միջև կապի հորիզոնական սխալը 0,1 մմ-ից բարձր չէ
9.3 Անդադար կշռման տվյալների ճշգրտությունը և երթևեկության անվտանգությունն ապահովելու համար առջևի 60 մ ուղեցույցի ճանապարհի և հետևի 30 մ ուղեցույցի ճանապարհի անդադար կշռման հայտնաբերման տարածքի ճանապարհի մեկուսացումը պետք է մեկուսացված լինի հոծ գծով:
9.4 Անդադար կշռման և փորձարկման տարածք՝ ճանապարհային հատվածների շինարարությունը ուղղորդելու համար
(1) Ուղեկցող ճանապարհի հատվածի ճանապարհի հունը պետք է կայուն լինի, իսկ ծածկի շփման գործակիցը պետք է համապատասխանի ճանապարհահատվածի նախագծային պահանջներին:
(2) Ուղեկցող ճանապարհի հատվածի մայթի մակերեսը պետք է լինի հարթ և կոմպակտ, իսկ ասֆալտապատ ծածկը չպետք է ունենա փոսեր, փոսեր, նստվածքներ, խցանումներ, ճաքեր, ցանցի ճաքեր և ուռուցիկներ, իսկ ցեմենտի ծածկը չպետք է ունենա երերուն, կոտրված թիթեղներ, նստեցում, ցեխի կուտակում և այլ հիվանդություններ: Ցեմենտ-բետոնե ծածկի և ասֆալտբետոնե ծածկի հարթությունը պետք է համապատասխանի JTGF80-1 «Ավտոճանապարհների ինժեներական որակի ստուգման և գնահատման ստանդարտների» համապատասխան դրույթներին և պահանջներին:
3) Ուղեկցող ճանապարհի հատվածի ճանապարհի մակերեսի լայնությունը պետք է կարողանա ապահովել ամենալայն բեռնատար մեքենայի նորմալ անցումը կշռման միջակայքում։
(4) Մայթի կենտրոնական գիծը անդադար կշռման և փորձարկման տարածքում պետք է մեկուսացված լինի կրկնակի դեղին (մեկ դեղին) պինդ գծերով, իսկ երթևեկի սահմանազատման գիծը պետք է մեկուսացված լինի սպիտակ հոծ գծերով:
3. Ինտերֆեյսի արձանագրության և տվյալների ձևաչափի պահանջներ
Մայրուղու գերբեռնվածության անդադար հայտնաբերման համակարգի ինտերֆեյսի արձանագրությունը և տվյալների ձևաչափը պետք է համապատասխանի «Fujian Traffic Comprehensive Administrative Direct Enforcement Engineering Design Plan»-ի համապատասխան դրույթներին և պահանջներին՝ ապահովելու փոխկապակցումը և տեղեկատվության փոխանակումը շրջանի (շրջանի), քաղաքային և մարզային գերբեռնվածության տեղեկատվության կառավարման (ներառյալ ուղղակի կիրարկումը) հարթակների միջև:

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Չենդու գրասենյակ՝ Թիվ 2004, Բաժին 1, շենք 2, թիվ 158, Տյանֆու 4-րդ փողոց, բարձր տեխնոլոգիաների գոտի, Չենդու
Հոնկոնգի գրասենյակ՝ 8F, Cheung Wang շենք, 251 San Wui Street, Հոնկոնգ
Գործարան: Շենք 36, Սիչուան նահանգ, Մյանյան քաղաք, Ջինձիալին արդյունաբերական գոտի
Հրապարակման ժամանակը` Հունվար-25-2024




